
LS엠트론 기술교육아카데미에서 누구나 쉽게 사출성형을 이해할 수 있도록 사출성형 입문자를 대상으로 한 기술 자료를 공개했다. 이번 호는 유압 및 절전형 사출성형기의 이해를 위해 ‘제어장치 구성 및 조작 방법’을 다룬다.
* 자료 : LS엠트론 기술교육아카데미(http://lsmtronacademy.com)
5.1 절전형(옵션) 서보 구성도(드라이버+모터+펌프)
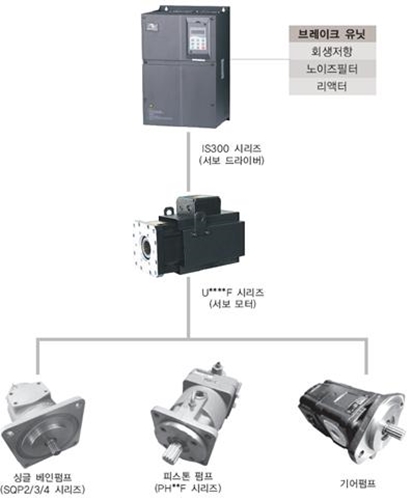
M모델은 2개의 시스템 조합으로 구성된다.
5.1.1 구동 방식 특징
1. 동기식 서보모터를 펌프 구동원으로 사용하기 때문에 응답성 및 정밀도가 향상된다.
2. 서보모터의 회전수에 의해 펌프 토출량이 제어되므로 불필요한 에너지 낭비를 줄일 수 있다.
3. 기계동작이 멈추는 시퀀스에서는 서보모터의 회전이 최소화돼 에너지 소모가 되지 않는다.
4. 유압라인의 압력을 서보 모터의 회전으로 제어한다.
5.1.2 제어 방식
인버터(서보 드라이버)는 지령에 맞는 RPM을 제어하기 위해 서보모터로부터 엔코더 피드백 신호를 받아 제어한다. 또, 인버터는 지령에 맞는 압력을 제어하기 위해 유압라인의 압력센서를 입력으로 피드백 받아 정확한 압력을 제어한다.
5.2 절전형(옵션) 서보 다이어그램
![]()
5.2.1 기호 설명
1) 구성부품
• Machine Controller : 상위 제어기, 설비 시퀀스 제어
• Servo Driver : 서보 모터의 토오크, 회전수 제어
• SM : 동기식 서보 모터
• P : 유압 펌프(피스톤식, 기어식, 베인식)
• Encoder : 엔코더, 모터의 회전수 피드백
• Pressure Sensor : 압력센서, 유압 라인의 압력 피드백 신호
• SRDY : 서보 드라이버의 기동 준비 완료 신호(Servo Ready)
• SON : 서보 드라이버의 기동 지령 신호(Servo On)
• RESET: 서보 드라이버의 알람 리셋 지령 신호(Reset)
• ERR : 서보드라이버의 에러 발생 알람 신호(Error)
• MODE : 서보드라이버의 동작모드 선택 지령신호
• QCMD : 서보드라이버의 회전수 지령신호(회전 RPM=유량)
• PCMD : 서보드라이버의 토오크 지령신호(토오크=유압 bar)
• QMON : 서보드라이버의 회전수 피드백 신호(회전 RPM=유량)
• PMON : 서보드라이버의 토오크 피드백 신호(토오크=유압 bar)
2) 구동원리
서보 드라이버는 상위 제어기의 속도/압력의 신호를 받아 서보 모터의 회전수와 토오크를 제어한다. 회전수는 엔코더 피드백, 토오크는 압력센서의 피드백을 받아 폐루프를 제어한다. 서보 드라이버는 기존 유도전동기 구동에 비해 동작 효율을 높여 에너지를 절감한다.
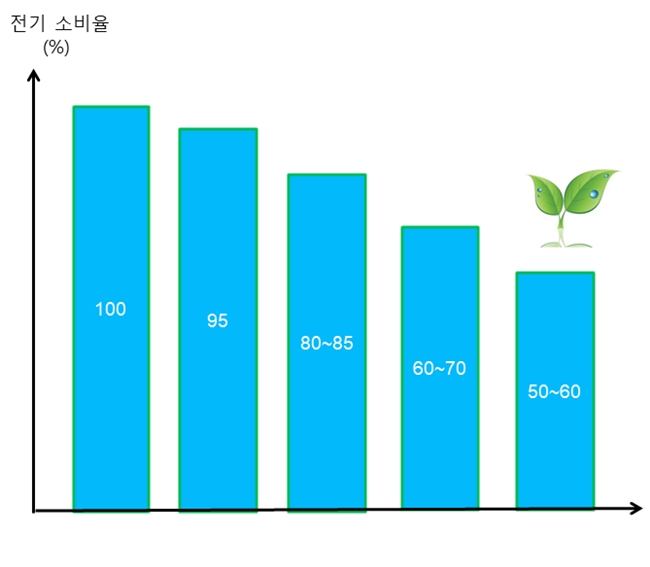
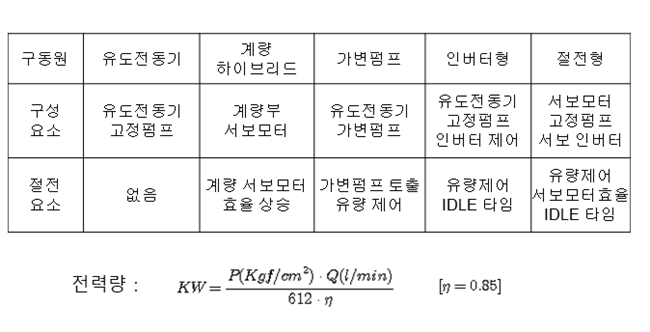
6. 유압 구동원별 에너지 사용량

![[KOREA PACK 2026] 리팩, 로타리 자동포장기 라인업으로 기술력 강조](https://file.yeogie.com/img.news/202604/md/XTLh7SwKC1.jpg)
![[ESG PACK 2026] 동신이앤피, 친환경 패키징 솔루션으로 시장 공략](https://file.yeogie.com/img.news/202604/md/ZOWXlqmAwB.jpg)
![[SIMTOS 2026] (주)수에코신소재, 초경량 에어로젤 기반 복합소재 기술 공개](https://file.yeogie.com/img.news/202604/md/WoOQ2BH3H4.jpg)
![[KOREA PACK 2026] 백천기계, 충전·포장 자동화 기술 소개](https://file.yeogie.com/img.news/202604/md/Jw6C94IZzd.jpg)
![[KOREA PACK 2026] 세종파마텍, 제약 생산 자동화 설비 제시](https://file.yeogie.com/img.news/202604/md/p6QiaHw07k.jpg)



![[포토] 나노융합R&D성과홍보관, 한국형 뉴딜 실현을 위한 나노 기술 한자리에](https://file.yeogie.com/img.news/202107/thumb/71VDLJ439J.jpg)
![[포토] 나노코리아 2021, 전격 개막!](https://file.yeogie.com/img.news/202107/thumb/iIOQla1NKy.jpg)
![[포토] 제2차 석유화학 탄소제로위원회 개최](https://file.yeogie.com/img.news/202107/thumb/xelbLpva1l.png)


![[산업전망] 인도 EPDM 시장 전망](https://file.yeogie.com/img.news/202406/md/m4G8EiK428.jpg)



